Kobras OÜ viis 2016. a kevadel läbi koostöös TTÜ Tartu Kolledžiga endise Rakke lubjatehase suletud prügila aeromõõdistamise mehitamata õhusõiduki (UAV) ehk drooniga. Mõõdistamise eesmärk oli saada prügilast mudel, mida saaks võrrelda maa peal tehtud teostusmõõdistuse põhjal tehtud mudeliga ning välja selgitada, milline ja kui suur on kahe mudeli erinevus.

Aeromõõdistamiseks kasutati drooni DJI Matrice 100 (kõrvaloleval pildil), millel oli peal 12 MP kaamera X3. Selle piksli läbimõõduks olenevalt kõrgusest on kuni ca 3 cm.
Mõõdistamise ala suuruseks oli 5,4 ha. Droonil kulus selle ala lendamiseks ja üles pildistamiseks alla 10 minuti. Lennuplaan anti droonile ette ning lennutamine toimus autonoomselt tarkvara abiga.

Joonis 2.
Mõõdistamise tulemusena saadakse fotogrammeetria meetodite abil objekti punktipilv (fotode põhjal värvitud punktid), (georefereeritud) ortofotomosaiik (Joonis 2), (georefeeritud) maakatte kõrgusmudel ning 3D mudel.
Maapealsete tähiste kasutamisel saab tulemused siduda Eesti geodeetilise koordinaatsüsteemiga ning tulemusi kasutada edasistes projektides. Aeromõõdistuse täpsuse hindamisel võeti aluseks prügila teostusmõõdistus. Mudeli horisontaalne täpsus jäi vahemikku 2 – 22 cm.
Kõrguslik erinevus jäi suures osas vahemikku – 0,3 m – 0,3 m. Kuigi oli ka suuremaid erinevusi, kus drooniga mõõdetud pinnamudel oli teostusmõõdistusest kuni 1,1 m allpool ja kohti, kus droonimudel oli 2,4 m kõrgemal teostusmõõdistusest (Joonis 3). Põhiliselt on suured vead kõrguslikult just järskudel nõlvadel.
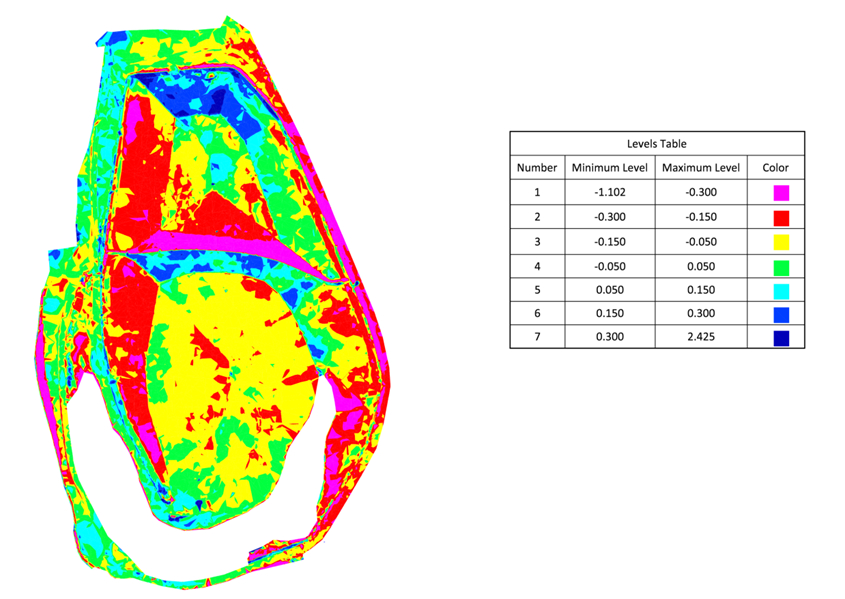
Joonis 3.
Mõned levinumad formaadid, mida tarkvara abil saab drooniga tehtud fotodest teha on järgmised:
• Ortomosaiike (.tif)(.jpg)(.png)
• Georefereeritud ortofotomosaiike (.tif)
• Georefereeritud kõrgusmudeleid (DSM) (.tif)
• Georefereeritud TIN kõrgusmudeleid (.obj)(.dwg)(.dgn)
• KML formaadis mudelid
• Ortofotomosaiigi alusel värvitud punktipilvesid (.asc, .las, laz)
Tulemuseks saime sellise igast küljest vaadeldava prügila mudeli: